El pulso de señal óptica digital impacta el objeto y se refleja de nuevo en el sistema óptico. El pulso de retorno se refleja en el segundo Fotodetector d1. La parte electrónica de la ruta de señal D1 es la misma que la ruta de señal d2. El tiempo de vuelo se puede calcular después de que dos señales lleguen al Microcontrolador (mcu).
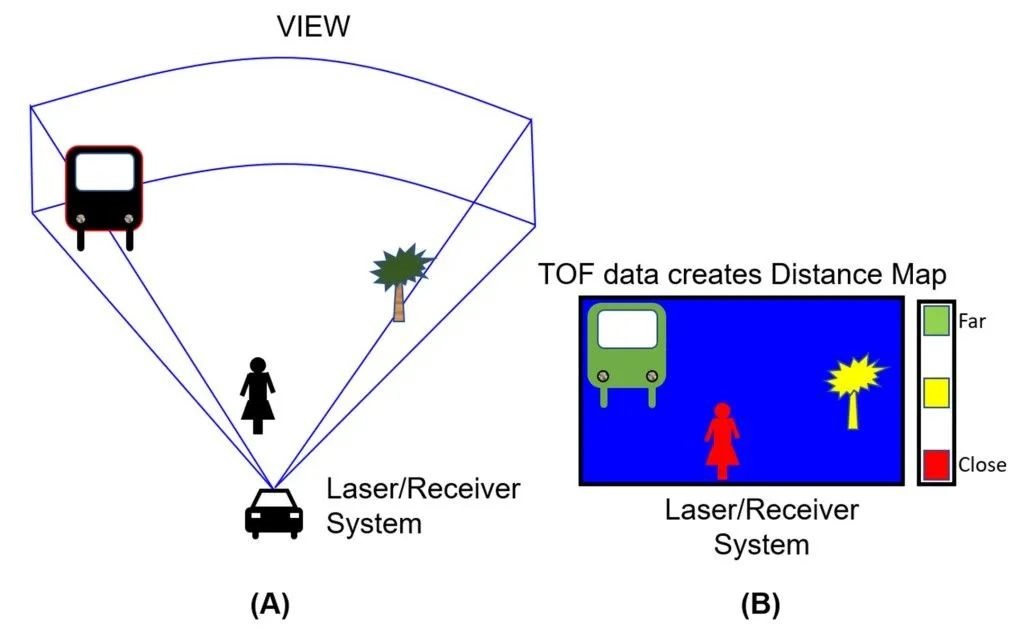
El sistema de radar láser del automóvil utiliza láser pulsado para medir la distancia entre los dos vehículos. El sistema automotriz utiliza LIDAR para controlar la velocidad y el sistema de frenado para hacer frente a cambios repentinos en las condiciones de tráfico. El LIDAR desempeña un papel importante en las funciones semiautomáticas o totalmente automáticas de asistencia a los vehículos, como los sistemas de advertencia y evitación de colisiones, la asistencia de mantenimiento de carriles, la advertencia de salida de carriles, el monitor de puntos ciegos y el control de crucero adaptativo. El radar láser automotriz está reemplazando al sistema de radar en los primeros sistemas de automatización de vehículos. El sistema de radar láser puede oscilar entre unos metros y más de 1.000 metros.
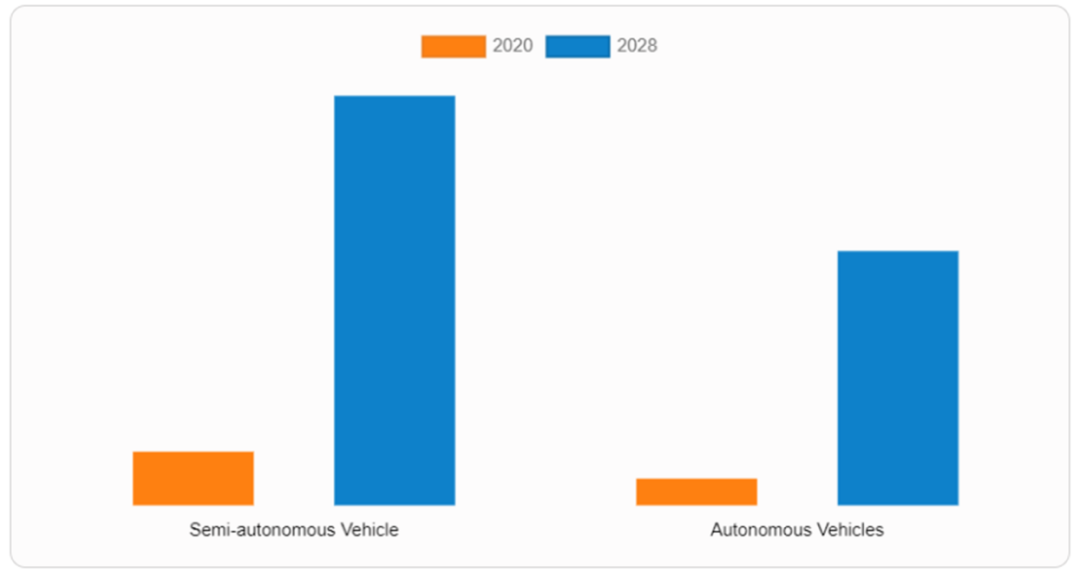
Figura 4: el mercado de LIDAR automotriz se divide en aplicaciones automotrices semiautomáticas y totalmente autónomas. (fuente de la imagen: Allied Market research)
Los vehículos autónomos ya se utilizan ampliamente, y el sistema de imágenes por radar láser mejorará aún más esta situación. Los radares, las cámaras y los equipos de radar láser siguen siendo las tecnologías preferidas para la conducción semiautomática y la conducción totalmente autónoma, y el precio del radar láser está disminuyendo y el mercado está acelerando este cambio.













 Box optronics
Box optronics Box optronics
Box optronics 'sales@boxoptronics.com'
'sales@boxoptronics.com'