視覚部分は、カメラまたはドライバの可視性、オブジェクト分類、および横方向の解像度を表します。暗闇や雪、ほこり、雨などの天気条件はこれらの能力を弱めます。レーダ部はRF信号の戻りを示す。この信号は天候条件や暗闇の影響を受けず、距離も測定できる。レーザレーダ部分は、さらなる物体分類、横方向分解能、測距、および暗透過を提供することによってセンシング画像を完成することができる。
レーザレーダシステムの基本要素は、方形波送信機システム、ターゲット環境、および環境中の外部要素との距離を解釈するための光受信機システムを含む。レーザレーダセンシング方法パルスレーザ形式の光を用いて、戻り信号の飛行時間(ToF)を解析することにより距離を測定する(図2)。
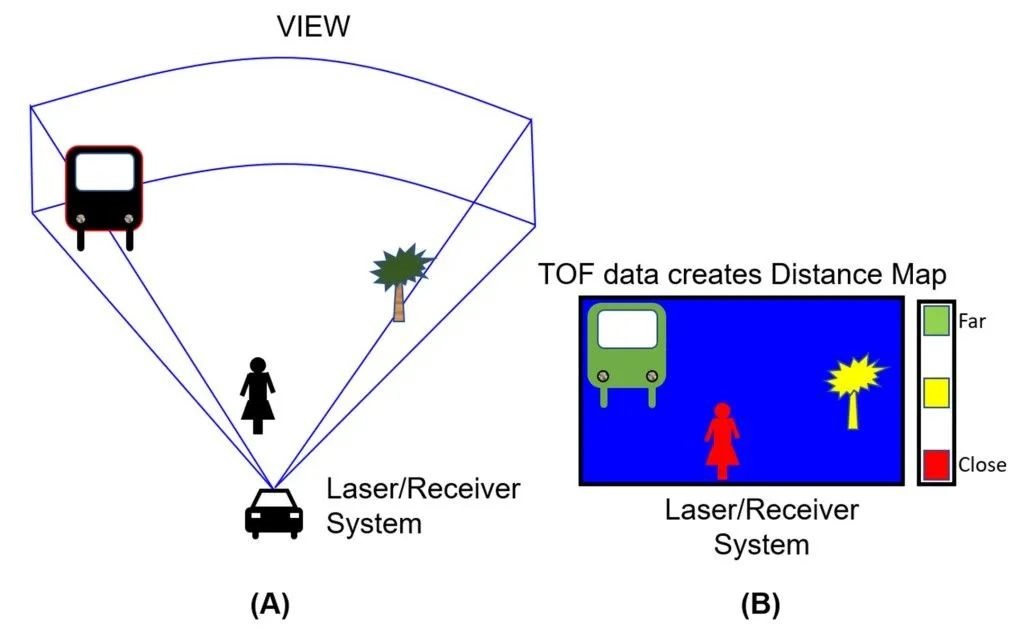
図3:レーザレーダの電子部分は1つのレーザダイオードエミッタと2つのフォトダイオードレシーバから構成される。(画像ソース:Bonnie Baker)
レーザダイオードは1枚のガラスを通してデジタルパルスを伝送する。この信号もD 2フォトダイオードで反射する。この信号の処理は、システムに組み込まれた伝送時間と電子遅延を提供する。
デジタル光信号パルスは物体に衝撃を与え、光学系に反射して戻る。リターンパルスは第2フォトダイオードD 1に反射される。D 1信号経路の電子部分はD 2信号経路と同じである。飛行時間は、2つの信号がマイクロコントローラ(MCU)に到達した後に計算することができる。
図2:各レーザレーダ送信ユニットには三角形の「視野」がある。(画像ソース:Bonnie Baker)
距離の描画は光デジタル信号に依存する。
デジタルドメインにおける信号
レーザレーダの回路解決策は、自動車トランスインピーダンス増幅器を用いて信号受信問題を解決することである。入力段は、光検出器から負の入力電流パルスを受け取るために使用される(図3)。

市場概況
自動車レーザレーダシステムは、パルスレーザを用いて2台の車両間の距離を測定する。自動車システムは、交通状況の突然の変化に対応するために、レーザレーダを用いて車速と制動システムを制御する。レーザレーダは、衝突警告や回避システム、車線保持補助、車線逸脱警告、盲点モニタ、適応巡航制御などの半自動または全自動自動車補助機能において重要な役割を果たしている。自動車レーザレーダは、初期の車両自動化システムにおけるレーダシステムに取って代わっている。レーザレーダシステムの範囲は数メートルから1000メートル以上であることができる。
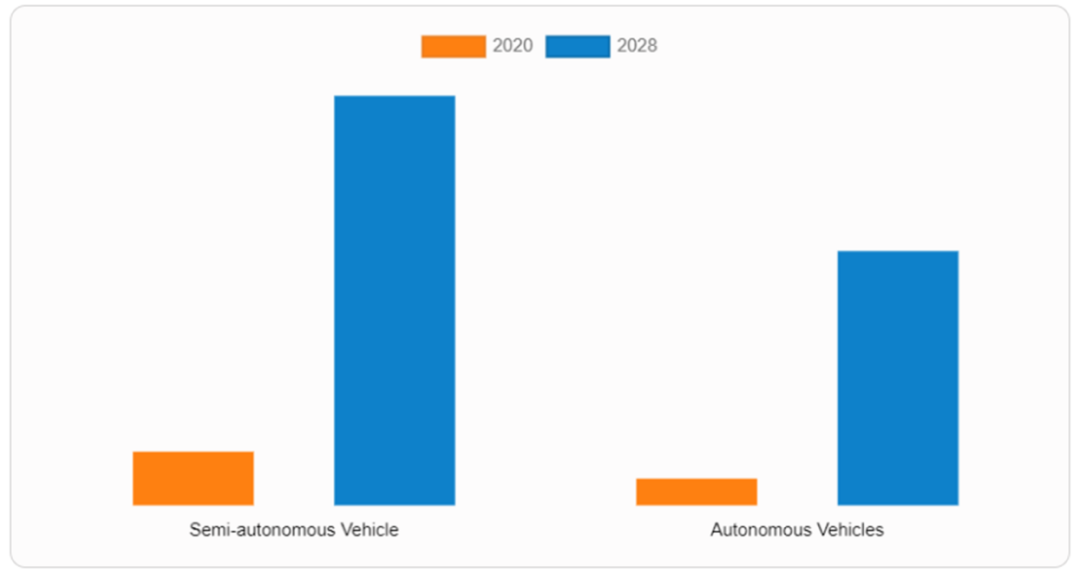
図4:自動車レーザーレーダー市場は半自動運転と全自動運転自動車応用に分けられる。(画像ソース:Allied Market Research)
自動運転車はすでに広く使われており、レーザーレーダイメージングシステムはさらに改善されるだろう。レーダー、カメラ、レーザーレーダー設備は依然として半自動運転と全自動運転の優先技術であり、レーザーレーダーの価格は低下しており、市場はこの変化を加速している。












 Box optronics
Box optronics Box optronics
Box optronics 'sales@boxoptronics.com'
'sales@boxoptronics.com'