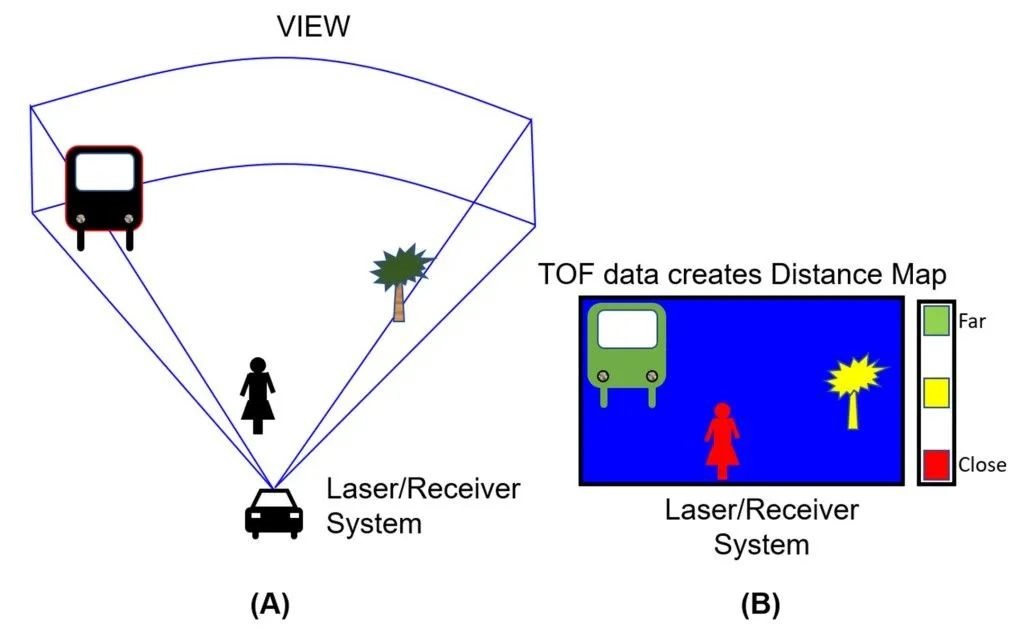
Цифровой световой сигнал пульс поражает объект и отражается обратно в оптическую систему. Обратный импульс отражается на втором фотодиоде D1. Электронная часть пути сигнала D1 идентична пути сигнала D2. Время полета может быть рассчитано после того, как два сигнала достигнут микроконтроллера (MCU).
Автомобильная лазерная радиолокационная система использует импульсный лазер для измерения расстояния между двумя автомобилями. Автомобильные системы используют лазерные радары для управления скоростью и тормозной системой в ответ на внезапные изменения условий движения. Лазерные радары играют важную роль в полуавтоматических или полностью автоматических вспомогательных функциях автомобиля, таких как системы предупреждения о столкновениях и обхода, вспомогательные средства удержания полосы движения, предупреждения об отклонении полосы движения, мониторы слепых пятен и адаптивный круиз - контроль. Автомобильные лазерные радары заменяют радиолокационные системы в ранних системах автоматизации транспортных средств. Лазерная радиолокационная система может простираться от нескольких метров до 1000 метров и более.
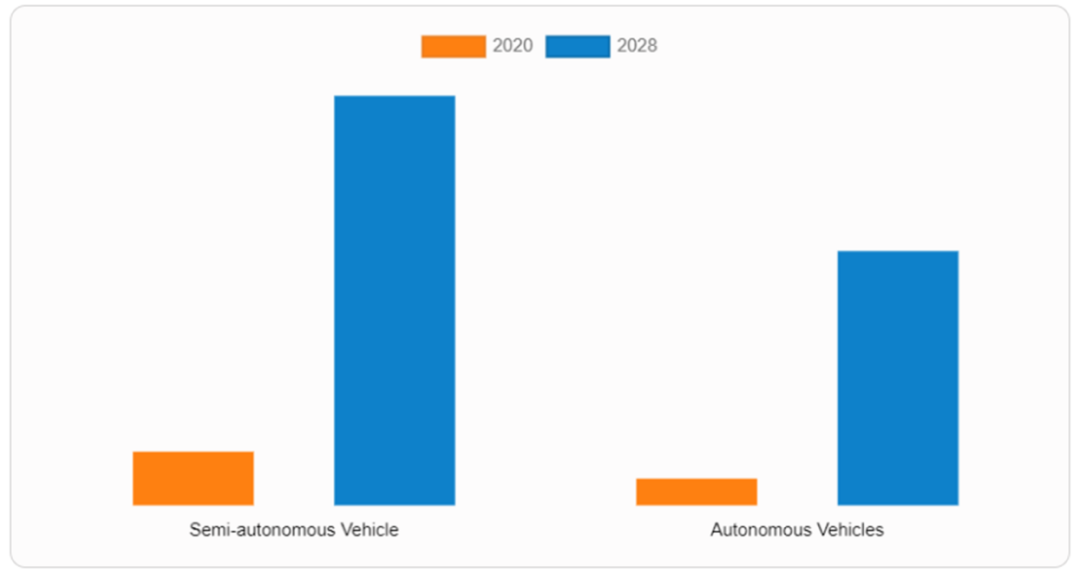
Рисунок 4: Рынок автомобильных лазерных радаров разделен на полуавтономные и полностью автономные автомобильные приложения. (Источник: Allied Market Research)
Автономные транспортные средства уже широко используются, и системы лазерной радиолокационной визуализации еще больше улучшат ситуацию. Радары, камеры и лазерные радары остаются предпочтительными технологиями для полуавтономного и полностью автономного вождения, а цены на лазерные радары снижаются, и рынок ускоряет эти изменения.













 Box optronics
Box optronics Box optronics
Box optronics 'sales@boxoptronics.com'
'sales@boxoptronics.com'