视觉部分表示摄像头或驾驶员的可见性、对象分类和横向分辨率。黑暗和雪、灰尘或雨水等天气条件会削弱这些能力。雷达部分表示RF信号的返回。这种信号不受天气条件和黑暗的影响,同时还能测量距离。激光雷达部分可以通过提供进一步的物体分类、横向分辨率、测距和暗穿透来完成传感图像。
激光雷达系统的基本元件包括方波发射器系统、目标环境和用于解释与环境中外部元件的距离的光学接收器系统。激光雷达传感方法使用脉冲激光形式的光,通过分析返回信号的飞行时间(ToF)来测量距离(图2)。
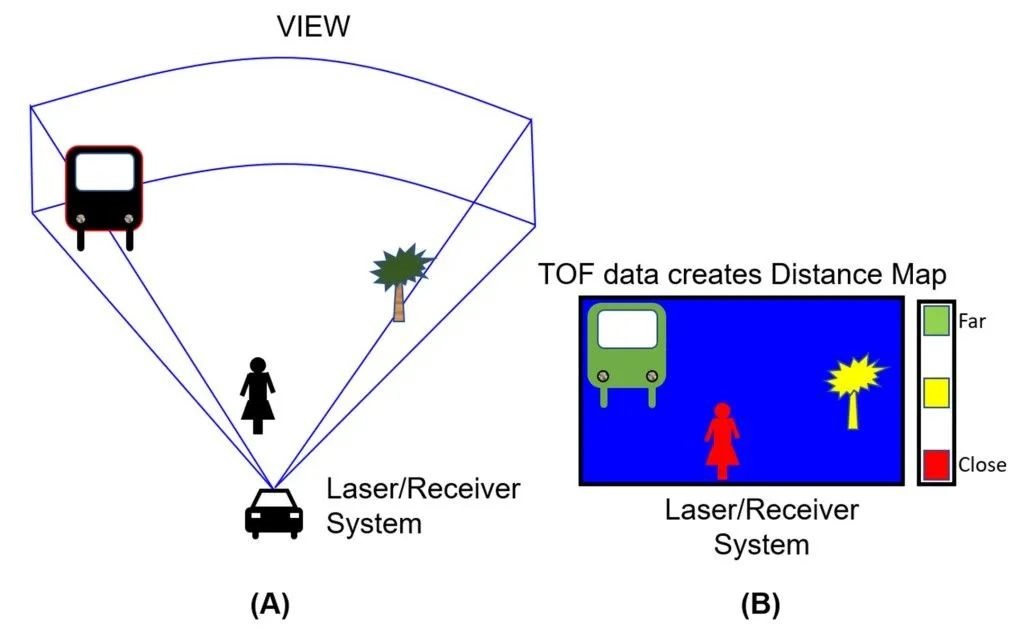
图2:每个激光雷达发射单元都有一个三角形的“视场”。(图片来源:Bonnie Baker)
距离的绘制取决于光学数字信号。
数字域中的信号
激光雷达的电路解决方案是通过汽车跨阻放大器来解决信号接收问题。输入级用于接受来自光电探测器的负输入电流脉冲(图3)。

图3:激光雷达的电子部分由一个激光二极管发射器和两个光电二极管接收器组成。(图片来源:Bonnie Baker)
激光二极管通过一块玻璃传输数字脉冲。该信号也在D2光电二极管上反射。该信号的处理提供了系统中内置的传输时间和电子延迟。
数字光信号脉冲击中物体并反射回光学系统。返回脉冲被反射到第二光电二极管D1。D1信号路径的电子部分与D2信号路径相同。飞行时间可以在两个信号到达微控制器(MCU)之后计算。
市场概况
汽车激光雷达系统使用脉冲激光测量两辆车之间的距离。汽车系统使用激光雷达来控制车速和制动系统,以应对交通状况的突然变化。激光雷达在半自动或全自动汽车辅助功能中发挥着重要作用,如碰撞警告和规避系统、车道保持辅助、车道偏离警告、盲点监视器和自适应巡航控制。汽车激光雷达正在取代早期车辆自动化系统中的雷达系统。激光雷达系统的范围可以从几米到1000米以上。
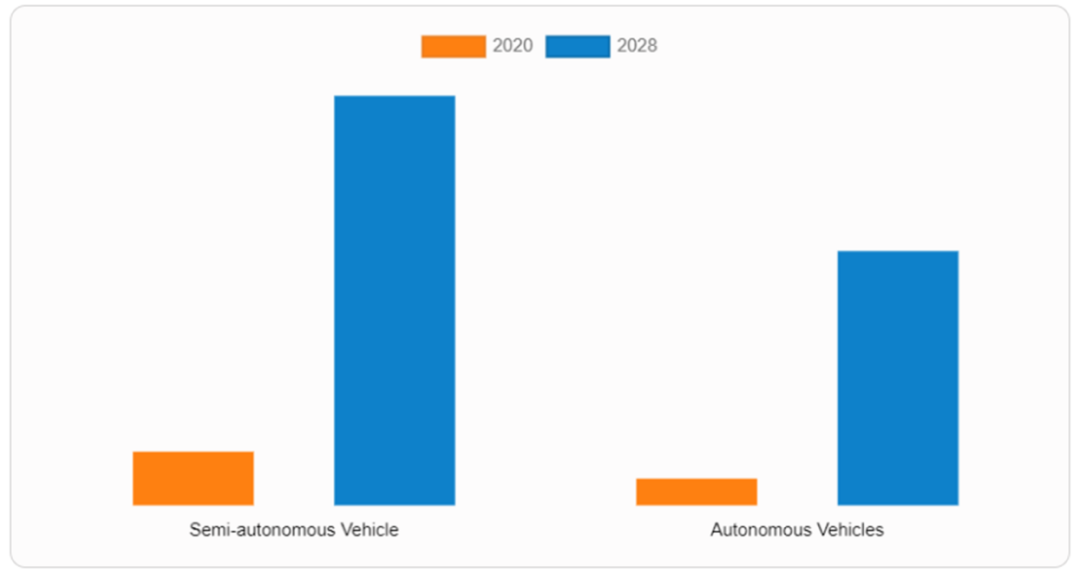
图4:汽车激光雷达市场分为半自动驾驶和全自动驾驶汽车应用。(图片来源:Allied Market Research)
自动驾驶汽车已经在广泛使用,激光雷达成像系统将进一步改善这种情况。雷达、摄像头和激光雷达设备仍然是半自动驾驶和全自动驾驶的首选技术,激光雷达的价格正在下降,市场正在加速这一变化。












 Box optronics
Box optronics Box optronics
Box optronics 'sales@boxoptronics.com'
'sales@boxoptronics.com'